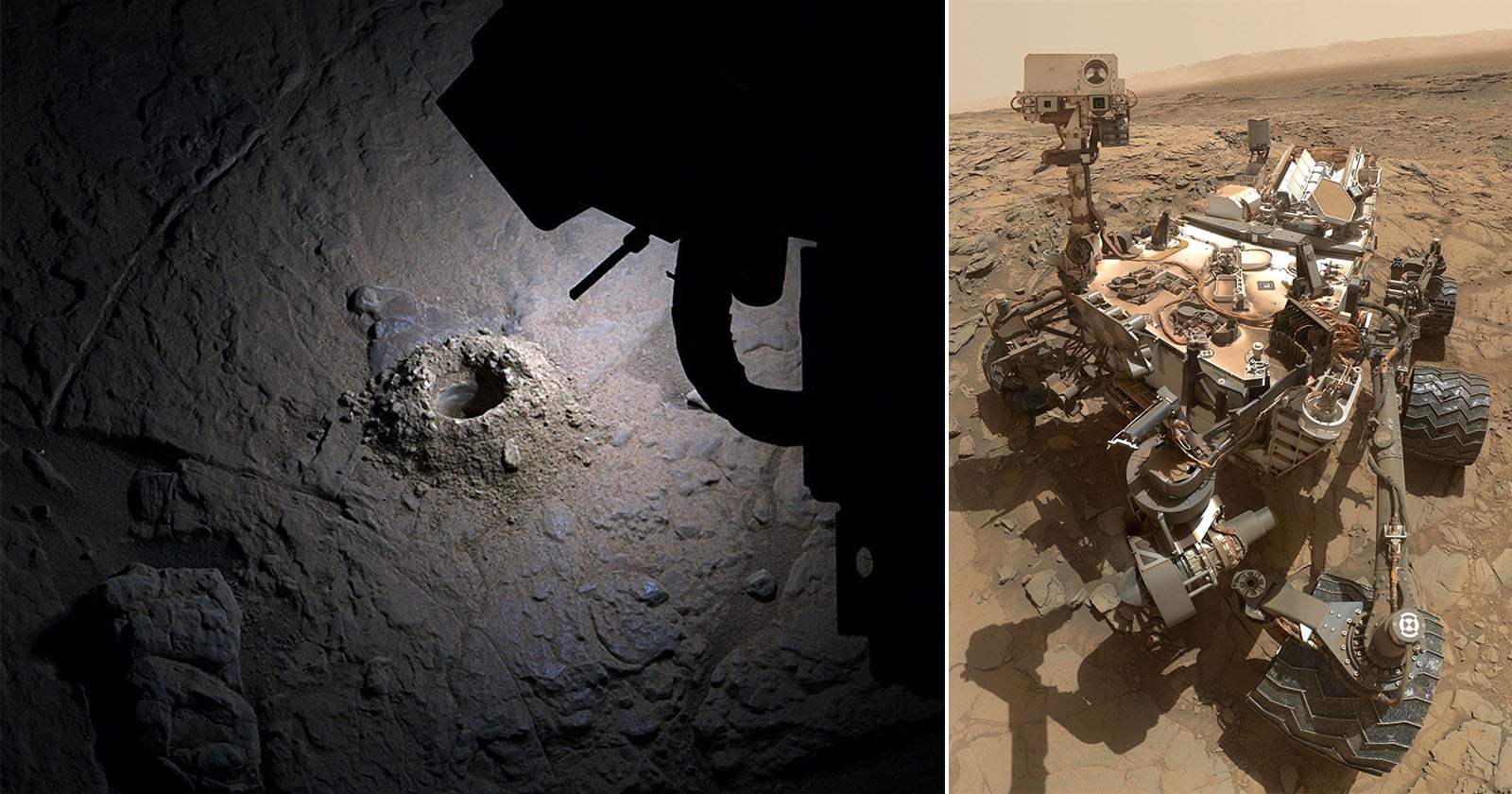
NASA‘s Curiosity rover has captured a rare night portrait of the Martian surface, using its onboard LEDs to light the scene so scientists could inspect a freshly drilled hole. The image was taken on December 6, 2025, during Sol 4,740 of the mission, after the team drilled a rock target nicknamed “Nevado Sajama” in a region marked by boxwork formations that crisscross the ground like giant spiderwebs when viewed from orbit.
Beyond the striking visuals, the observation reflects how a flagship U.S. planetary mission now routinely operates as part of a long‑lived government science program, with imaging choices feeding back into future rover designs, budget decisions, and international collaboration on Mars exploration strategy under the umbrella of NASA’s Mars Exploration Program.
An after-hours exposure built for analysis
Curiosity’s LEDs live on the Mars Hand Lens Imager (MAHLI) at the end of the rover’s robotic arm, but the nighttime photo itself was taken with Mastcam, the rover’s primary color imaging system. Mission planners opted for the late shoot to reduce the influence of Mars’ dusty, reddish daylight and to get a clean look at the hole’s interior surfaces after a recent change in drilling technique produced rougher edges on many targets.
“The M‑100 (Right) camera was used for the collaboration with MAHLI because of its higher resolution,” Kubacki tells PetaPixel. “The exposure time for the released M‑100 image was 5 seconds. Normal daylight auto‑exposure images are typically ~0.015 seconds, suggesting the LED‑illuminated scene is ~300-400× dimmer than Martian daylight (which already receives less than half the sunlight that Earth receives). Anyway, that day/night difference is the equivalent of about 8 or 9 stops.”
For NASA and its partners, these kinds of low‑light experiments are not just aesthetic; they help validate how far existing camera systems can be pushed within the constraints of a nuclear‑powered rover operating under institutional risk rules set by mission managers and federal overseers.
White LEDs as an in-situ color reference
Artificial white light provides a stable illumination source-a critical control for color accuracy when geology teams are comparing textures, cementing, and layering across targets. With the Sun out of the equation, researchers minimize atmospheric dust scattering and obtain cleaner reflectance information from the rock itself.
“Using the white‑light LEDs eliminates the environmental contribution of dusty sunlight (that is reddish) to the color imaging, making such nighttime white‑light LEDs the best way to assess the ‘true color’ when not doing other processing. The drill hole has been additionally processed, so it doesn’t necessarily show ‘true color.’ Some of our processing tries to mitigate the environmental contribution of color by performing ‘white balance’ and gray adjustment. This shows rocks as they might look on the Earth. The white LEDs do that ‘automatically,'” Kubacki continues.
This sort of standardized, repeatable imaging protocol is part of the evidence base that ultimately informs how future Mars missions are specified and funded under the U.S. civil space framework laid out in the National Aeronautics and Space Act, which tasks NASA with advancing scientific understanding while sharing data as a global public good.
How bright is Curiosity’s “flashlight”?
Despite the dramatic effect, the rover’s onboard lighting is intentionally modest-bright enough for science at short range without taxing power budgets or risking glare and overexposure.
- Per‑LED illumination (white light): 450-715 millicandelas (mcd)
- Qualitative brightness: “like lighting a few candles at the dinner table,” and “much dimmer” than a typical handheld flashlight
- Typical exposure for this night image: 5 seconds (versus ~0.015 seconds in daylight)
They are, at most, “like lighting a few candles at the dinner table,” Kubacki says. The MAHLI LED array is “much dimmer” than a standard flashlight, deliberately tuned for close‑up work a few centimeters from the target rather than dramatic spotlight beams across the landscape.

Capture timeline and mission context
- November 13, 2025: Curiosity drilled the target “Nevado Sajama.”
- December 6, 2025 (Sol 4,740): Mastcam executed a 5‑second LED‑illuminated night exposure of the drill hole.
These steps reflect a tactical workflow in which geology teams review drill outcomes, identify smooth‑walled candidates for inspection, and schedule specialized imaging sequences during optimal thermal and power windows. The workflow sits inside a larger cadence of Mars Science Laboratory operations, where each new imaging mode is weighed against rover health, remaining mission lifetime, and competing science priorities.
From Mastcam to desktop: the data path
Once acquired, imaging data is queued for downlink through Mars orbiters and the Deep Space Network, then processed and made public through NASA’s science portals. A mission resource with additional context on the night image is available via NASA’s science site.
- Sequence planning: science and engineering teams define exposure, arm pose, and LED usage.
- Acquisition: Mastcam M‑100 captures the scene while MAHLI supplies white LEDs.
- Onboard handling: data stored and prioritized for relay.
- Relay and processing: transmission via Mars orbiters/DSN, then calibration on Earth.
- Public access: images and metadata published for community use.
That open‑data pipeline, long established for Mars missions, is central to how publicly funded planetary missions are justified to lawmakers and overseen by advisory bodies, ensuring that raw and processed products can be scrutinized by scientists worldwide rather than remaining locked inside mission teams.
Technical notes from the imaging stack
Curiosity carries two Mastcam imagers-the wider M‑34 and the narrower, higher‑resolution M‑100-designed and operated by Malin Space Science Systems. The nighttime inspection leveraged the M‑100 to resolve fine textures within the drill hole.
- Imager: Mastcam M‑100 (Right) for higher spatial detail
- Illumination: MAHLI white LED array at close range
- Exposure settings: 5 s integration for night; typical daylight auto‑exposure ~0.015 s
- Relative scene brightness: ~300-400× dimmer than Martian daytime; ~8-9 stops difference
- Use case: evaluate wall smoothness, grain boundaries, and color independent of dusty ambient light
Engineers also use these observations to refine models of how Mastcam optics and detectors behave at long integration times, information that feeds into design reviews for successor instruments on future Mars landers and orbiters.

What controlled-light imaging unlocks for science
Uniform white illumination acts as a built‑in color chart, sharpening mineralogical assessments that inform where to drill, how aggressively to brush or abrade, and whether a target merits additional spectroscopy. For longer‑term planetary science, these scenes build a cross‑mission library of “true‑color” references that improve comparisons across seasons, instruments, and dust conditions.
- Color fidelity: reduces atmospheric reddening, improving white balance and gray calibration.
- Texture visibility: enhances subtle layering and cementation features inside drill walls.
- Method repeatability: creates standardized lighting for follow‑up targets and campaigns.
For hardware teams, the data also validate exposure margins, LED performance, and vibration tolerance during long integrations-useful knowledge for future rover designs and surface operations playbooks, including how conservative or aggressive to be when writing requirements into the next round of mission proposals.
Risk management for a five‑second Martian exposure
- Thermal conditions: scheduling during stable night temperatures to keep detectors within limits.
- Motion control: minimizing arm and mast movement to avoid blur across a 5 s integration.
- Power budgeting: balancing long exposures and LED draw against other nighttime activities.
- Data integrity: allocating downlink margin for full‑frame images with appropriate compression.
- Color controls: using white LEDs to decouple lighting variability from geological interpretation.
Each of these steps reflects the risk posture of a mission that has been operating on Mars since 2012: every extended‑mission experiment must earn its keep scientifically without compromising the rover systems that Congress and taxpayers paid to deliver to Gale Crater.
For readers seeking instrument internals-including optics, filters, and detector characteristics-see the peer‑reviewed technical description of Mastcam in the Earth and Space Science journal, which details how the camera system was qualified for deep‑space operations.
Image credits: NASA/JPL‑Caltech/MSSS.